- The magic of a driveless car (or a cruise missle flying towards its
intended target) are accomplished by:
- Input devices that provide data for the computer to make decisions (based on complex calculations on the input)
- Output devices that can carry out the decision of the computation made by the computer
Let's take the example of a dirveless car:
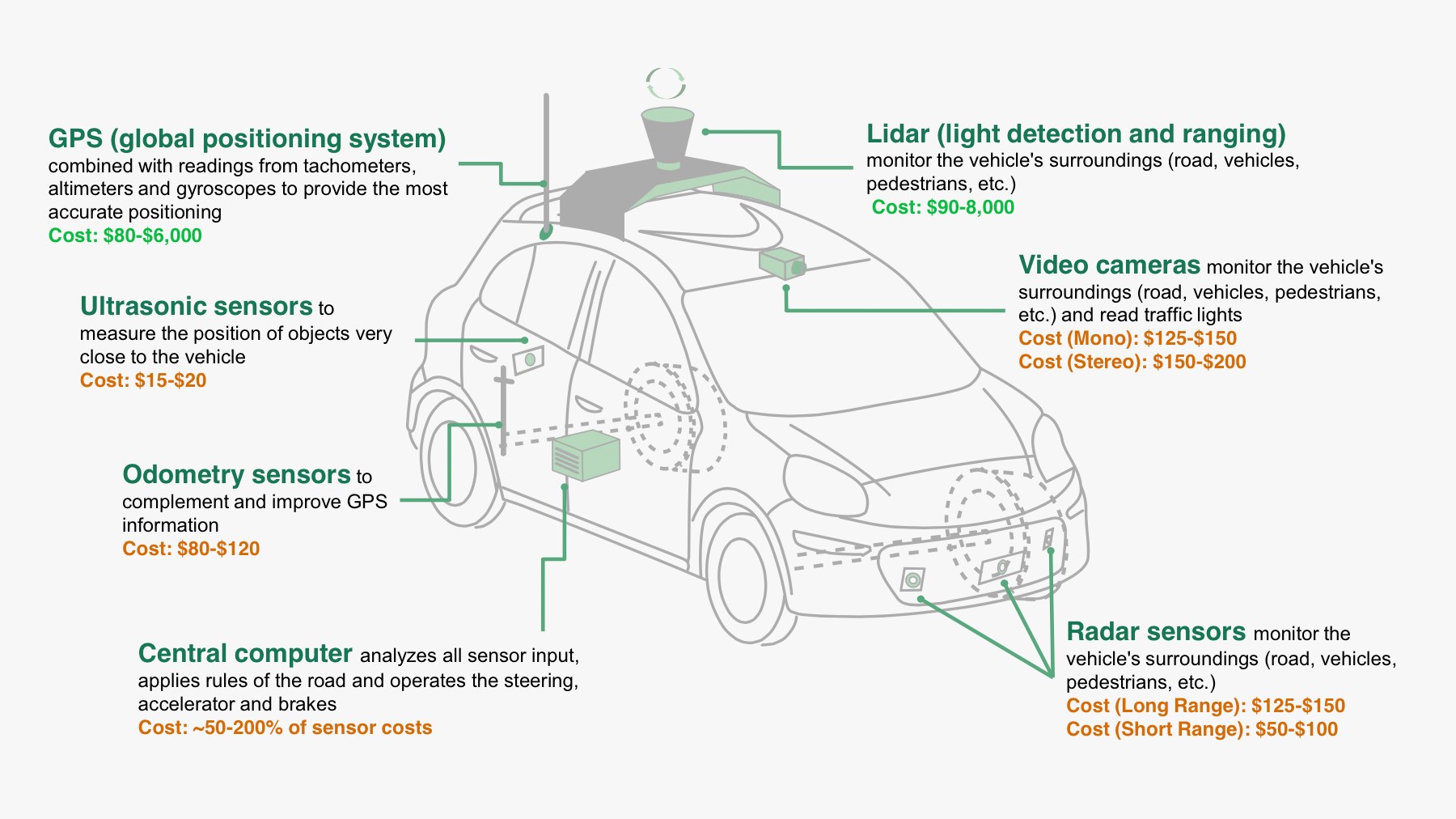
- Input sensors
(radar, lidar, infra-red sensors, ect) provides
input data on the surrounding to
the onboard computer:
- The computer then perform (still research in 2019) a series of
convolution steps on the
data (goolge
"semantic segmentation" to learn more)
to sort out the input data into coherent parts.
The result would look something like this:
- Based on the input, the
"driving program"
compute:
- What is the best speed for
the vehicle
- What is the best direction
- What is the best speed for
the vehicle
- The output devices will receive the
results computed by the
"driving program"
and translate them into
car actions:
- accelerate or decelerate
to the target speed
- turn the driving wheel and by how much to make the car go into the desired direction
- accelerate or decelerate
to the target speed
- Although the peripheral devices
are extremely important for the function
of a system (the sensors in a driveless car - without the sensors,
the car is blind !!), they are
not considered as
part of the
computer system
In CS255, we study the computer system: the CPU and the memory.
All the fancy peripherals (too many of them), will not come up much in this course.