How a computer "drives" a car (simplified explanation) -
the inputs of a self-driving car
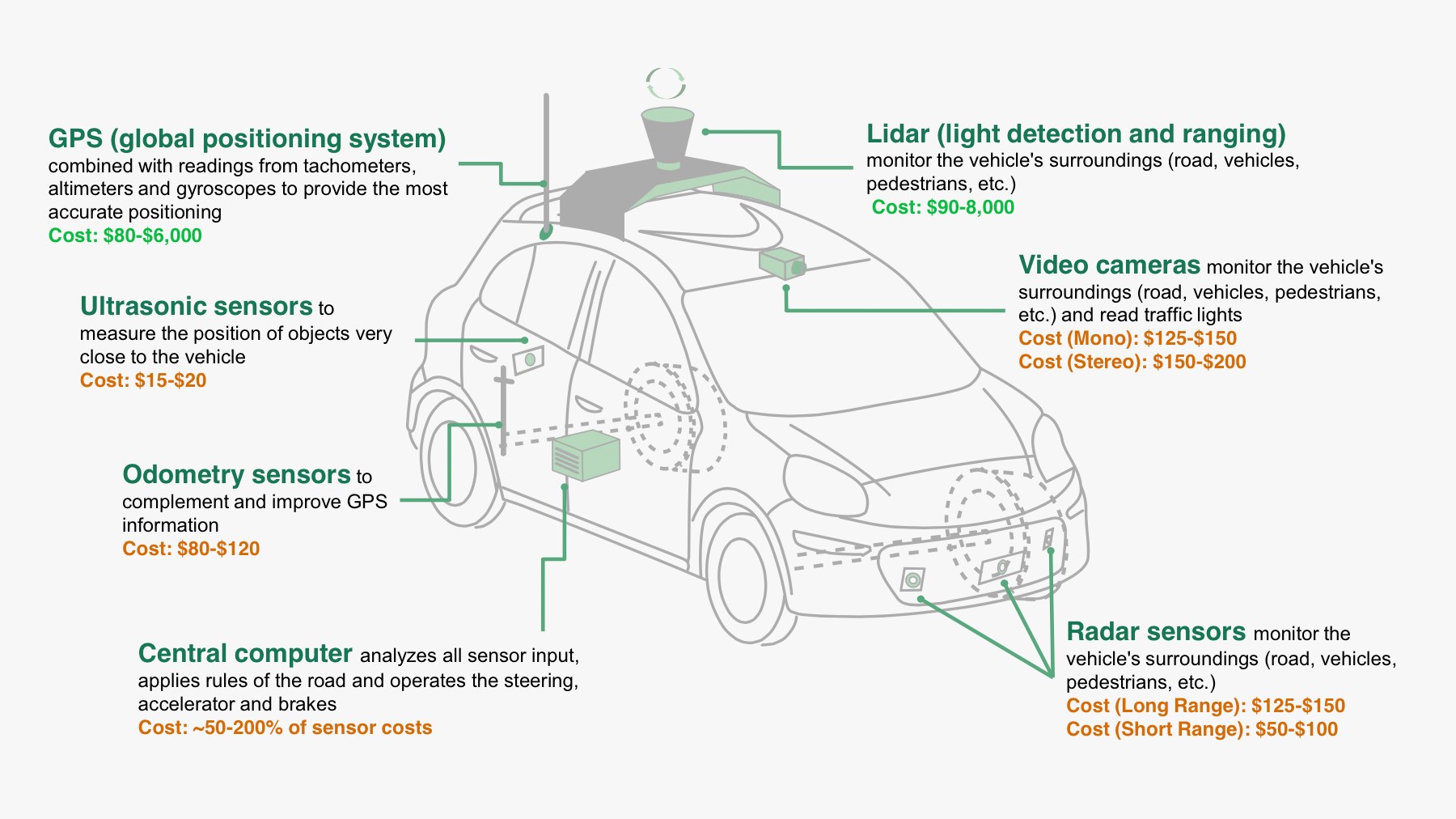
Input sensors (camera, radar, lidar, GPS, ect) provides input data on the surrounding to the onboard computer:
How a computer "drives" a car (simplified explanation) -
the computation performed
A specialized computer program categorizes the input data into objects:
This problem is called semantic (or image) segmentation ( click here)
How a computer "drives" a car (simplified explanation)
- output
Based on the input data, the
"self-driving" program will
compute:
|
The on-board computer will
then
send
control signals to:
|